次世代社会インフラ用ロボット開発・導入の推進現場検証。
当社 αUAV は「次世代社会インフラ用ロボット開発・導入の推進現場検証」に採択されています。
その検証フライトを昨日から今日の2日間行いました。
検証場所は奈良県の赤谷です。
あらかじめ離着陸点が3点用意されています。
崩落斜面の真正面で一番近い場所、2次災害のない最も遠い場所、その中間。
現実的に考えると被災直後に真正面まで行ける訳がないので、最も遠いところからチャレンジ。
源頭部まで水平距離で1.5km。比高差は900mです。
下記があらかじめ設定したフライトプランです。
Flight_Plan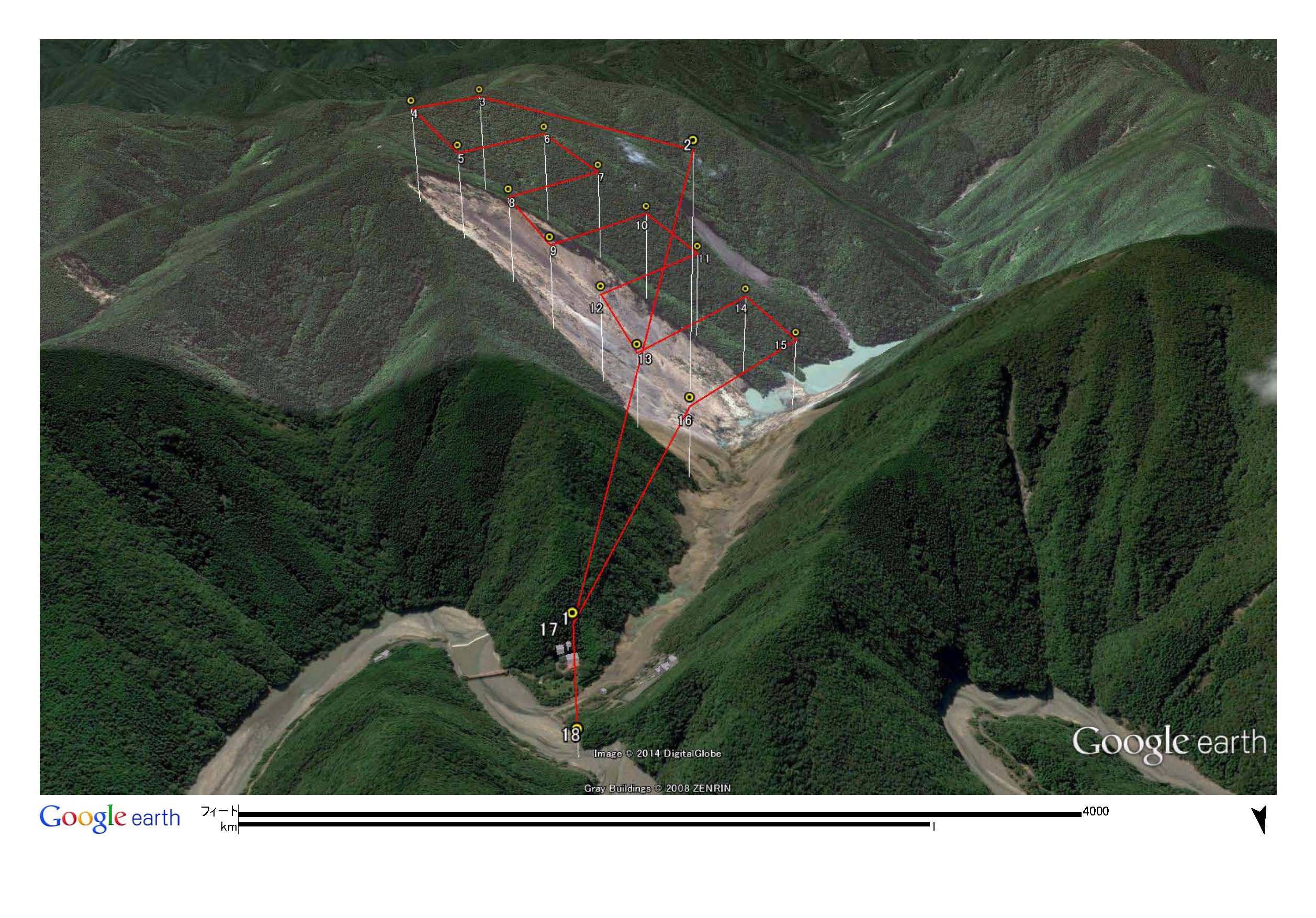
総飛行距離はなんやかんやで8km。
このプランで地上解像度50mm以下の平面直角座標に基づいたオルソ画像、3D点群や3Dモデルを得ることが可能です。
初日は霧の為、残念ながら写真が真っ白。
(それぞれ企業の時間割が決まっているので、当社の時は曇り)
(検証なのに当たり外れがあって何とも言えません)
今日は夕方近くのフライトでしたが、それなりに綺麗な画像となりました。
撮影対象の崩落斜面周りにはもちろん対空標識などないので、当社GCSv2の出番。
きちんと座標化された成果が無事仕上がりました。
お見せできないのは残念ですが、そのうち公開されるのかと。。。
とにかく長距離・長時間フライトが無事終わってホッとしています。
お疲れさまでした。